产品中心
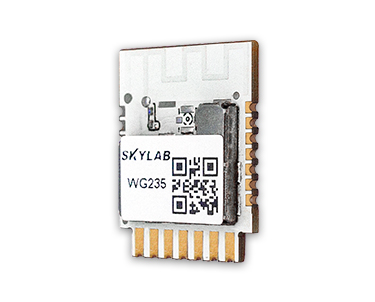
卫星导航模组
卫星通讯模组
卫星授时模组
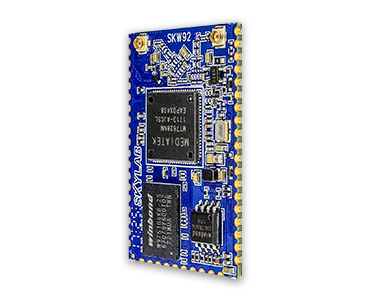
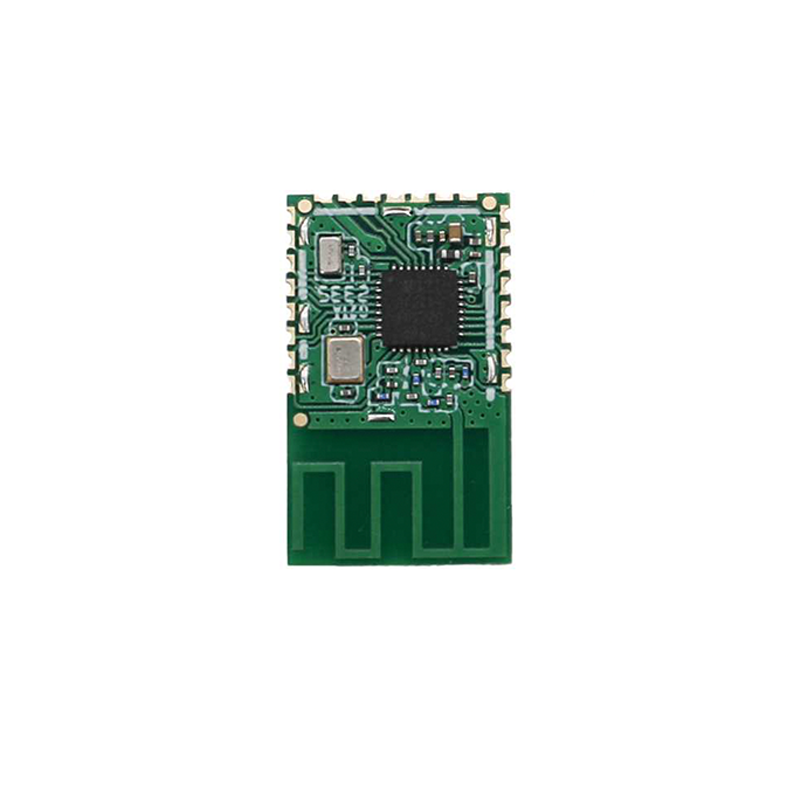
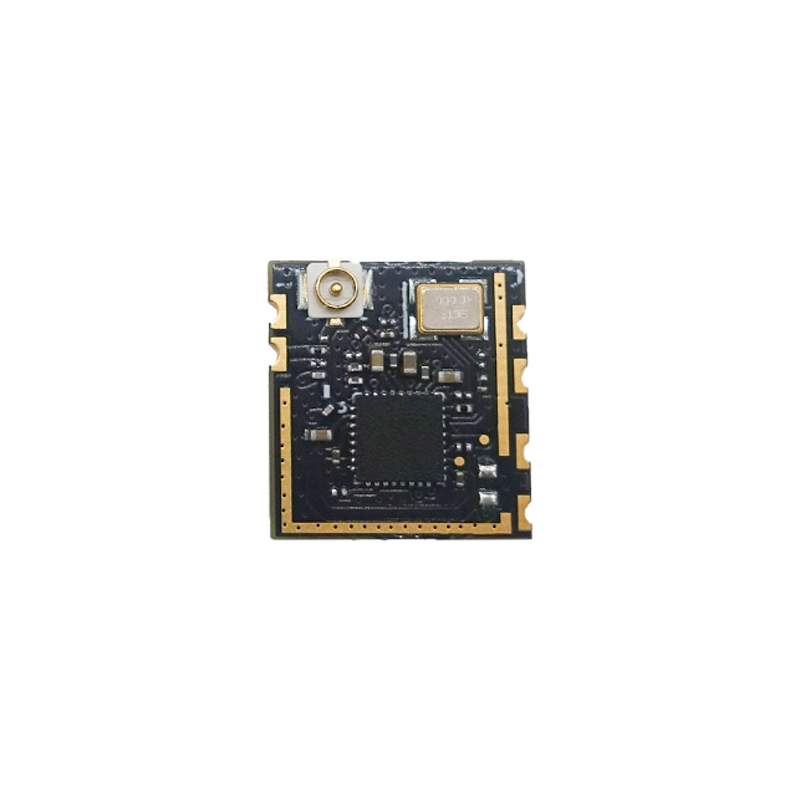
Wi-Fi模组
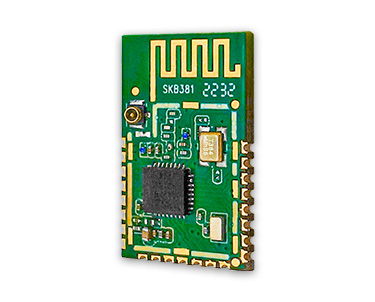
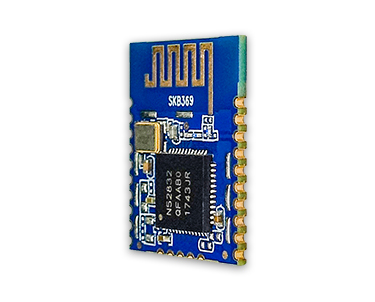
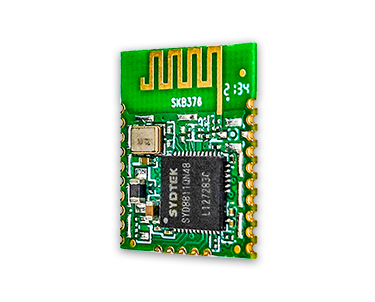
蓝牙模组
天线产品
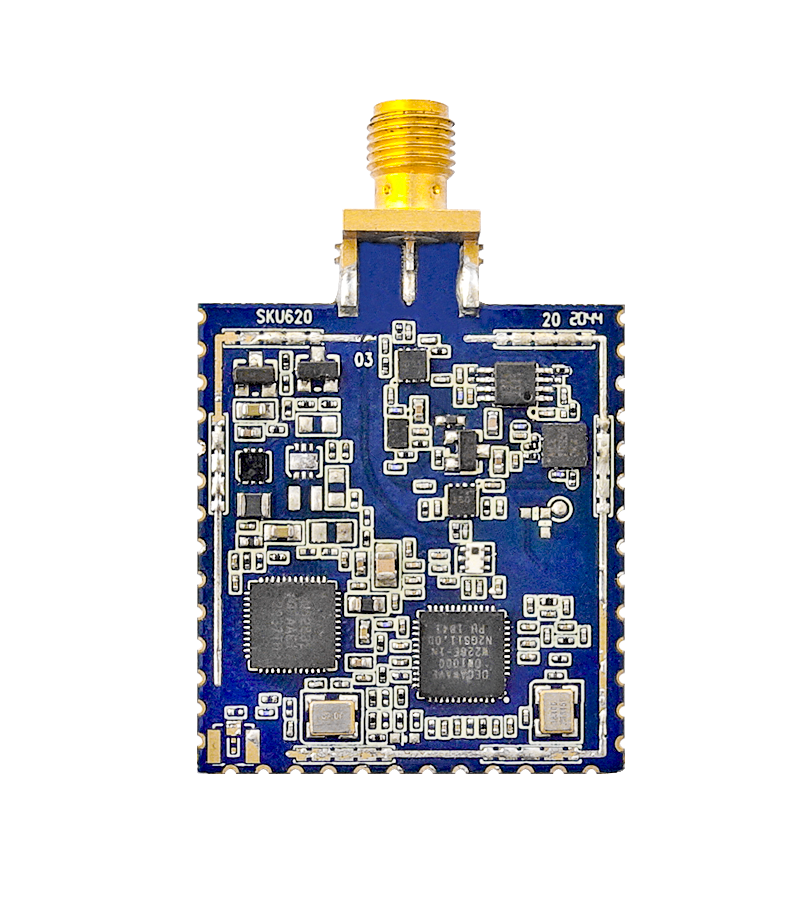
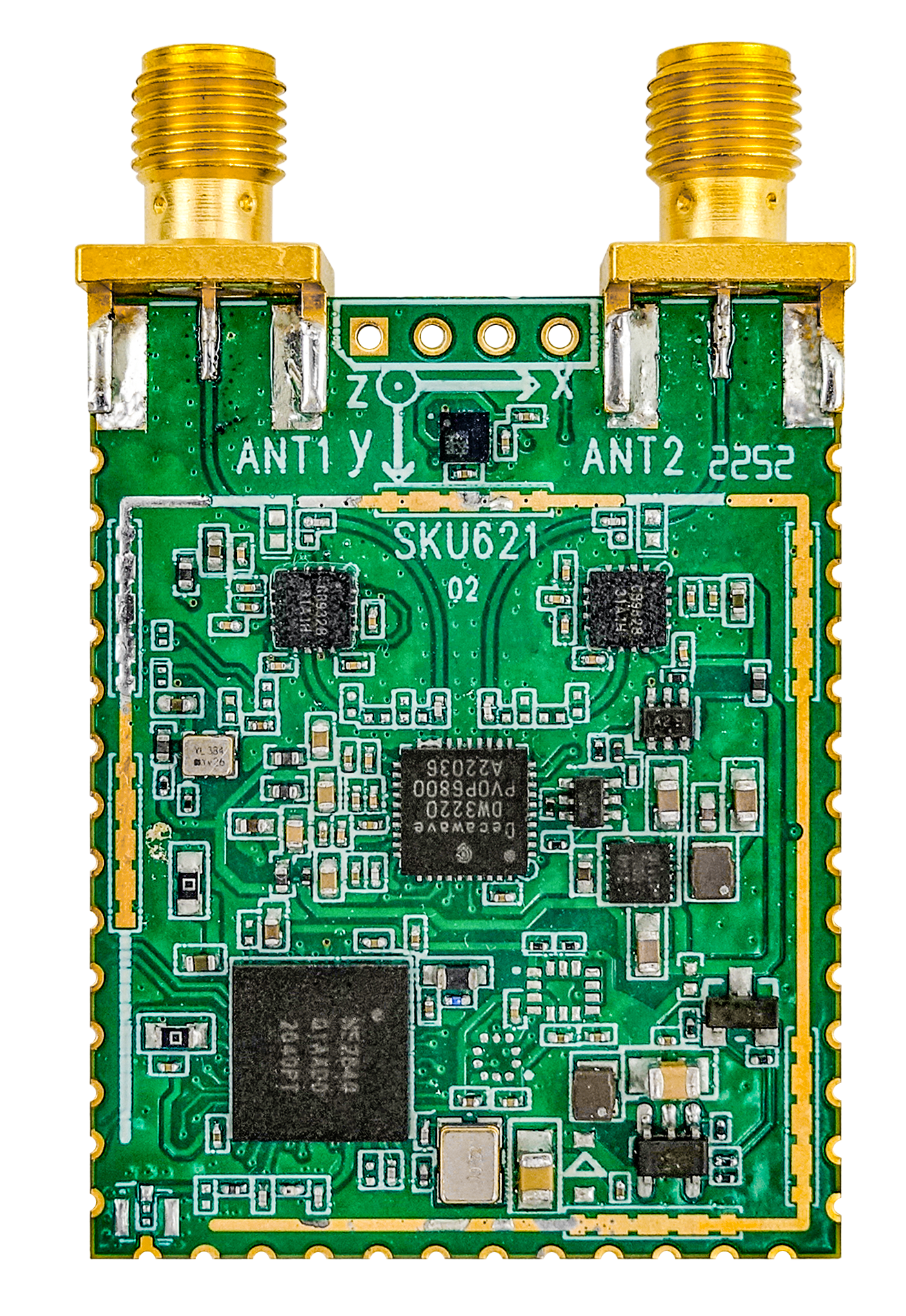
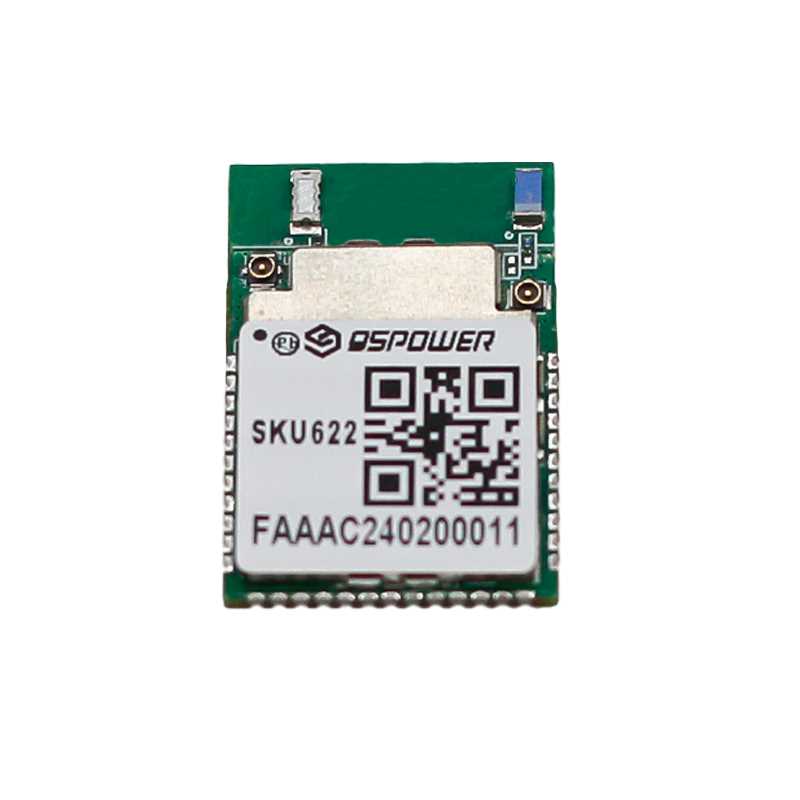
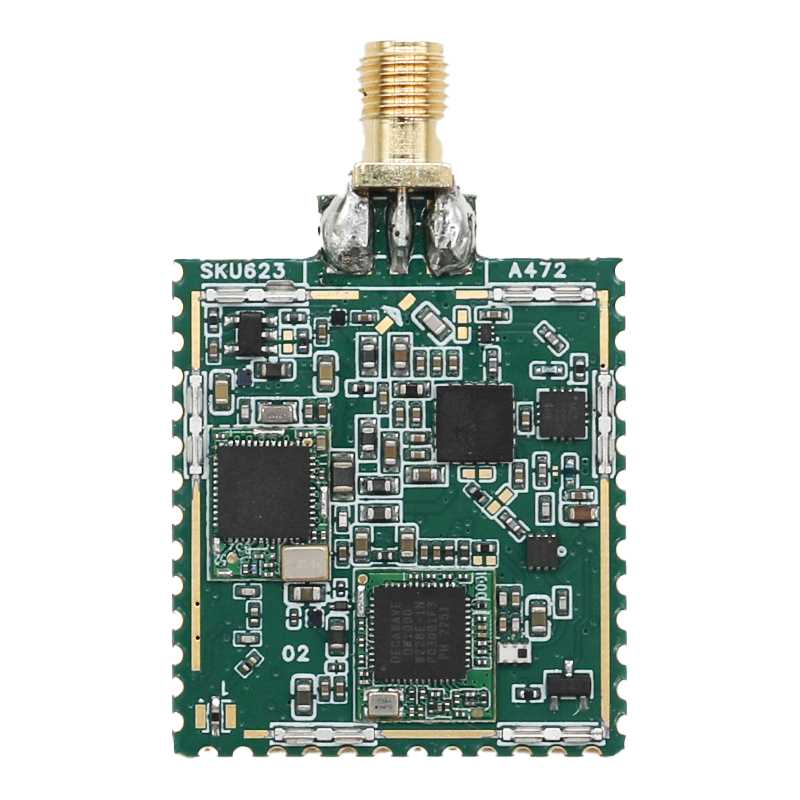
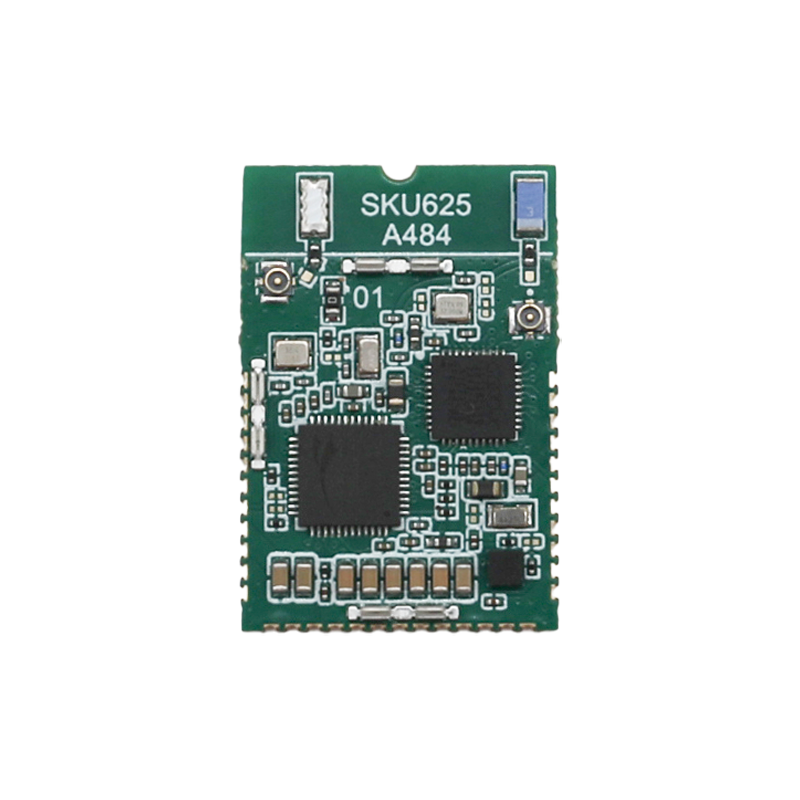
UWB模组
智慧方案